
квадрокоптер
Найдено: 2 записи
Песочница →
Использование инерциальной навигационной системы (ИНС) с несколькими датчиками на примере задачи стабилизации высоты квадрокоптера
В данной статье я постараюсь рассказать о своем опыте создания и реализации алгоритма для обработки сигналов с нескольких стандартных датчиков, входящих в состав ИНС (в английской версии IMU), для решения задачи стабилизации высоты многороторного летательного аппарата (в моем случае — квадрокоптера). На хабре уже был ряд статей, описывающих, что это за игрушка и как её сделать самому. Как программисту по профессии, мне было интересно не только его собрать, но и поковыряться в «мозгах» и сделать что-то полезное для сообщества. В качестве «мозгов» я выбрал Arduino и замечательный проект MultiWii. Он полностью открытый, динамично развивается, но в нем пока есть «белые пятна». Например, неудовлетворительно работает стабилизация положения по высоте. И я решил разобраться, можно ли с имеющимся оборудованием улучшить эту часть системы.
06.02.2012 04:24+0400
Научно популярное →
Разработчики из MIT приспособили квадрокоптер для получения модели комнаты
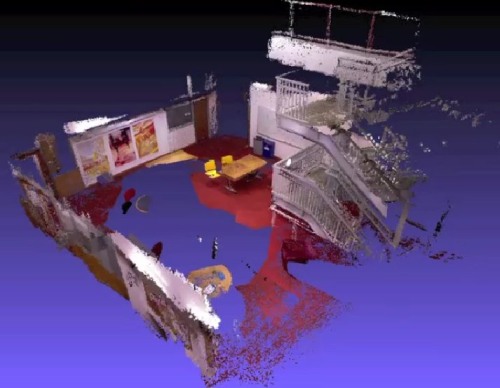
Команда умельцев из Массачусетского технологического института приспособила квадрокоптер для облета комнаты с целью создания 3D-модели помещения со всеми мелкими и крупными деталями. К слову, в этой схеме применяется X Box Kinect (а где он сейчас не применяется?). Интересно также и то, что все необходимые операции по просчету параметров модели ведутся прямо на борту квадрокоптера. Моделирование проводится в режиме реального времени.
Самое интересное, что создали эту систему не маститые ученые, а, как водится, студенты. Система бизируется на недавних достижениях университета в области визуальной одометрии (измерение пройденного расстояния). Теперь все достижения были использованы при создании данной схемы.
Стоит также отметить, что в системе не используется GPS — квадрокоптеры все «исследуют» на собственном опыте, создавая модель помещения и работая затем на основе полученных данных. Интересно и то, что схема не предусматривает использования внешних сенсоров, все данные система получает самостоятельно, на основе визуальных данных.
Ребята из MIT также использовали данные разработчиков Вашингтонского университета, а точнее — некоторые алгоритмы, разработанные для построения точных моделей окружающего пространства.
Результаты работы можно видеть ниже:
Via MIT
04.04.2011 13:39+0400